Cycle 4 S18 - Comment
les véhicules de demain pourront améliorer la sécurité et le confort
Faites vos recherches ici:
Compétences
travaillées dans la séquence
► Décrire, en utilisant les outils
et langages de descriptions adaptés, la structure et le comportement
des objets.
► Appliquer les principes élémentaires de l’algorithmique et du codage
à la résolution d’un problème simple.
► Simuler numériquement la structure et/ou le comportement d’un objet.
► Piloter un système connecté localement ou à
distance.
Connaissances
Outils numériques de présentation.
Charte
graphique.
Outils de description d’un fonctionnement, d’une structure et d’un
comportement.
Notions
d’algorithme et de programme. Notion de variable informatique.
Déclenchement d'une action par un événement, séquences d'instructions,
boucles, instructions conditionnelles. Systèmes embarqués. Forme et
transmission du signal. Capteur, actionneur,
interface. Notions d’écarts entre les attentes fixées par
le cahier des charges et les résultats de la
simulation.
Partie 01 - Comment une voiture
autonome peut-elle se déplacer seule ?
Un systéme de véhicule autonome nécéssite d'embarquer une
"intelligence" qui soit capable de réagir afin de preserver le
confort et la sécurité des passagers. Pour cela le systeme doit etre
programmé et configuré afin de prendre en compte tous les paramétres de
conduite :
Vitesse,
direction,
évitement d'abstacle,
détection et communication entre véhicules...
Quelles sont les
particularités d'une voiture autonome ?
Activité
d'investigation : De quelles capacités un véhicule a t il
besoin pour fonctionner ?
Enjeux - performance - énergie - ressource
Partie
02 - Programmons nos véhicules autonomes
Imaginer un protocole expérimental
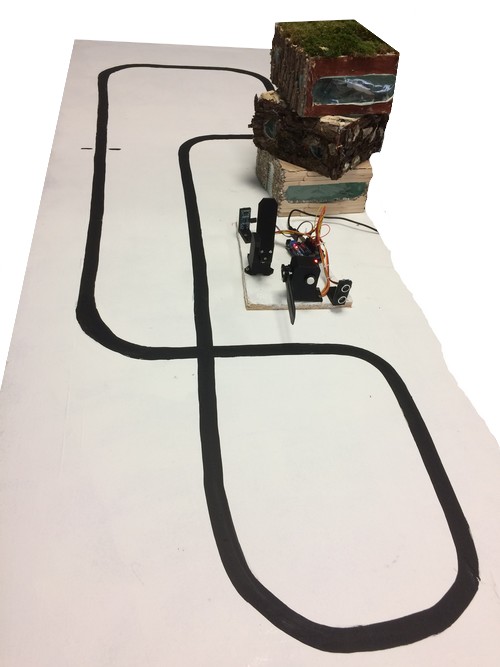
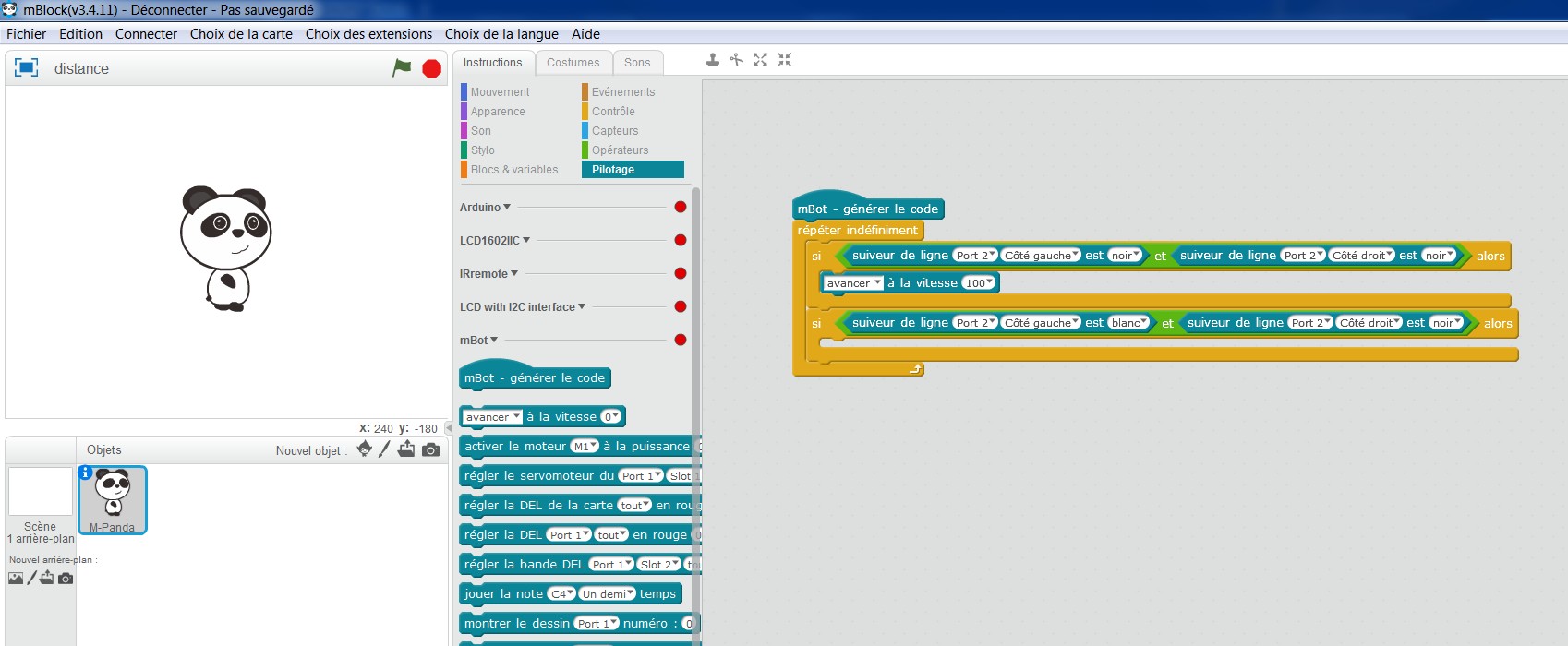
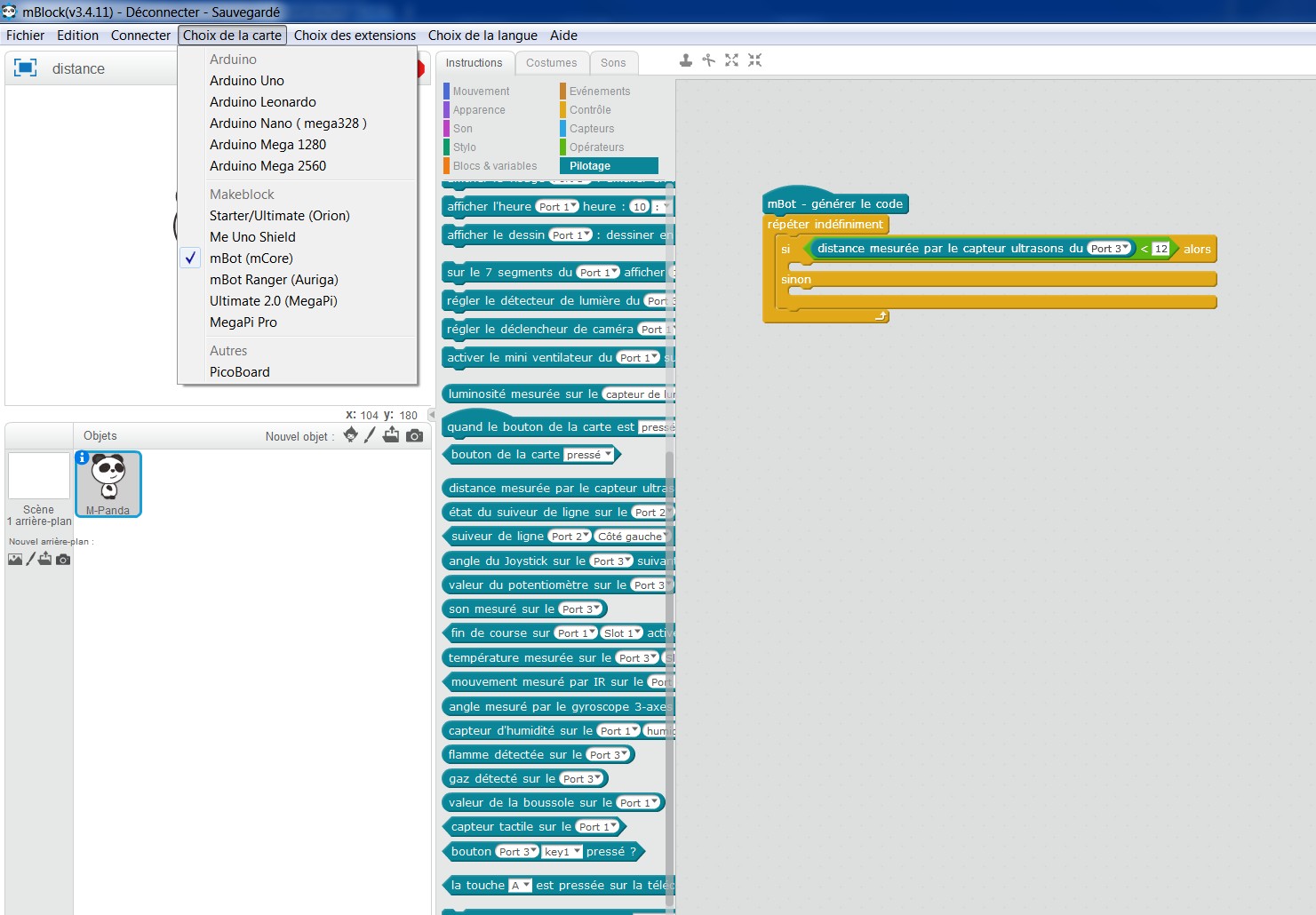
Nous désirons programmer nos
Robots Mbot afin qu'ils puissent suivre une ligne tracées à la peinture
noir représentant une route.
Le capteur de suivi de ligne renseigne le programme sur la présence de
Blanc ou de Noir sous celui-ci.
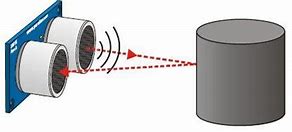
Les
Robots devront etre capable de se suivre sans se percuter. Pour cela
nous allons utiliser le capteur ultrason qui est capable de renseigner
le programme en fournissant une distance mesurée sans contact.
En cas
de difficultés visionner les coups de pouces du défi
protocole - expérimentation -
outils de mesure - validation de solution
Partie 03 - Les transports du futur
Quelles solutions pour
l'avenir de la mobilité ?
Nous allons réaliser une vidéo des 5 Mbots de circulation sur la
piste . Pour cela vous intègrerez à vos programmes une
personnalisation sur les couleurs et les sons.
Les robots doivent circuler sur la piste et
détecter les barrieres qui s'ouvrent et se ferment automatiquement.
La piste possède des virages sérrés qui ne permettent pas une vitesse
importante durant les déplacements. Par ailleurs, les obstacles peuvent se
trouver hors de la zone de circulation et ne doivent pas empecher les
robots de circuler s'ils sont détectés. Les robots doivent à tout prix
eviter les colissions entre eux mais aussi avec les pietons.
Adaptation d'un objet pour un nouveau besoin
- rédaction
d'un algorithme - language de programmation -
Pour aller plus loin...
Utilisation de la télécommande des Mbots Tracer une forme géometrique au feutre pour tableau sur une piste adaptée.


















{kind=link}
{kind=link}