►
Appliquer les principes élémentaires de l’algorithmique et du codage à
la résolution d’un problème simple.
►
Piloter un système connecté localement ou à distance.
►
Analyser le comportement attendu d’un système réel et décomposer le
problème posé en sous-problèmes afin de structurer un programme de
commande.
Partie 01 - Qu'est ce qu'une
interface Homme
Machine ?
Nous avions
visionnés quelques vidéos de robots pilotés à distance.
L'affichage de l'état des capteurs et d'un flux d'information
vidéo sur un écran permet au pilote d'éffectuer les opératiions de
recherche et d'exploration.
Cet affichage permet de créer un échange d'informations entre un objet
et un Homme. Il est donc important d'établir des voies de
communications et de choisir celle qui sera la plus adaptée à la
situation.
Nous allons définir ce qu'est une Interface Homme Machine.
Comment
communiquer avec notre robot ? De
quelles informations
avons-nous besoin pour créer une interface Homme Machine pour le robot? Comment
présenter cette
interface ?
Bilan 01 :
Partie 02 - Réalisation
d'une IHM pour le pilotage à distance du Robot
De quoi avons-nous besoin
pour réaliser ce travail ?
Nous avons
réalisé un croquis préparatoire aprés avoir choisi quelles informations
devaient etre présentées. Nous allons réaliser cette interface et la
programmer pour qu'elle
fonctionne avec le robot Mbot.
Le logiciel Mblock nous permet de créer une "application" qui sera apte
à communiquer par une liaison radio avec le robot.
Composition
du syteme de communication
Chaque
robot peut communiquer par onde radio (2,4ghz) avec un orniateur.
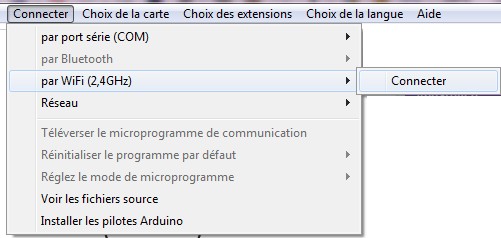
Pour
cela le robot est équipé d'un émetteur / recepteur et une clé USB radio
est connectée à un ordinateur. L'avantage de ce systeme est que cela
forme un systeme unique de communication, c'est à dire que la
transmission entre la clé et le
recepteur du robot ne peuvent pas etre parasitées par d'autres signaux
radio. On
parle alors d'appairage.
Missions à réaliser dans
votre groupe de travail 1- réaliser une
interface grâce au logiciel Mblock, 2- programmer cette interface pour
qu'une communication soit établie entre le robot et le PC, 3- réaliser le défi de déplacement
proposé par le professeur.
Ce
qu'il faut
comprendre : Il vous est demandé de réaliser une
"application" de controle du robot à distance afin de comprendre
comment sont imaginés et réalisés nos systemes.
Bilan 02 :
PARTIE 03 - Réussir les défis!
Le
professeur vous a préparé une série de defis à relever. Pour chaqun de
ces exercices d'applications, prenez quelques photos et/ou videos que
nous utiliserons ensuite dans votre préparation au DNB.
Pensez à transferer ces contenus multimedia sur les postes du college
de maniere à pouvoir travailler avec ces ressources dans les prochaines
séances.
Vidéos des
defis .... à venir
Bilan 03 :
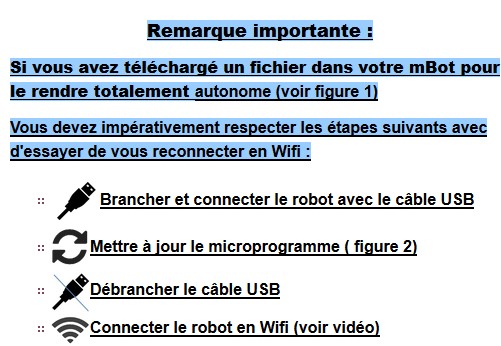
Configuration intiale de l'objet
Aller sur ce
site afin de
vérifier la configuration nécéssaire .
Vérifier en visionnant la vidéo les étapes de
configuration.
Fiche synthèse de la séquence
CONNAISSANCES
DE LA SÉQUENCE
Notions
d’algorithme et de programme. Notion de variable informatique.
Déclenchement d'une action par un événement, séquences d'instructions,
boucles, instructions conditionnelles. Systèmes embarqués. Forme et
transmission du signal. Capteur, actionneur, interface.