Partie 2 - Comment programmer le robot pour qu'il suive une ligne et qu'il ne percute
pas un autre robot ?
De quoi avons-nous besoin pour réaliser ce travail ?
Nous allons rédiger un bref cahier des charges pour cette mission en enrichissant les fonctionnalités du robot. Nous
effectuons ce travail pour découvrir comment utiliser cet objet
programmable afin de réaliser les défis proposés dans "L'EPI robotique".
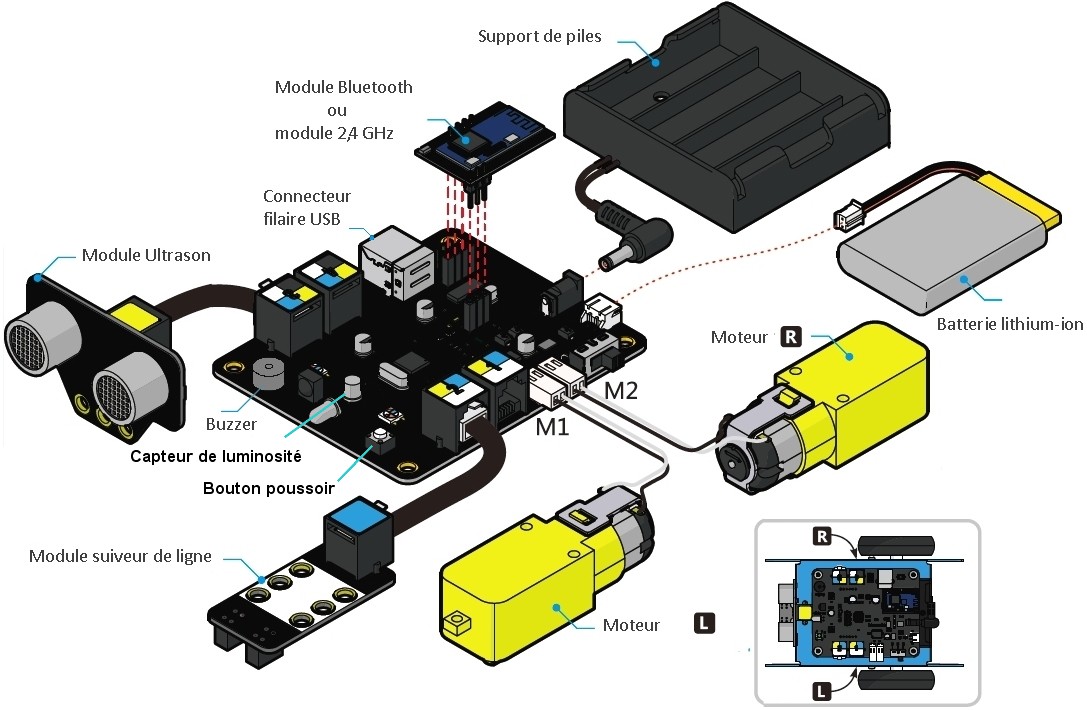
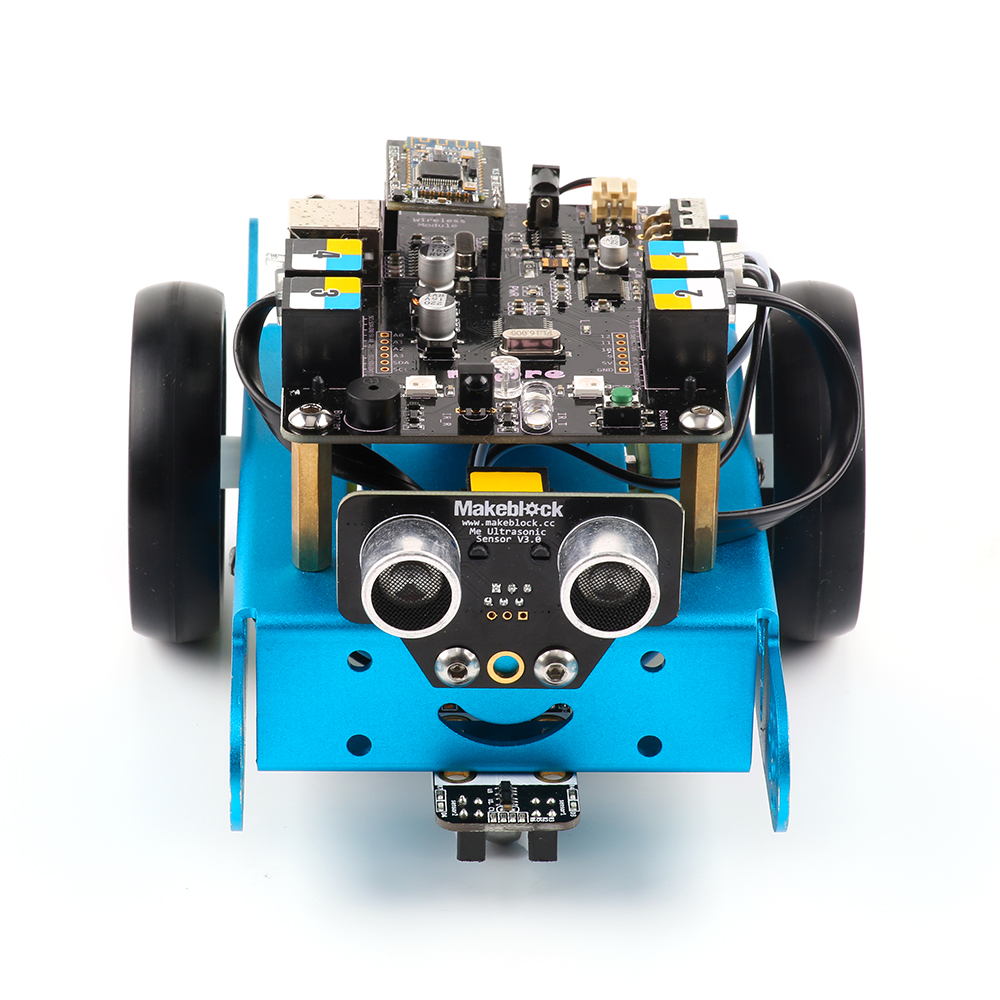
Composition du robot
Missions à réaliser dans votre groupe de travail :
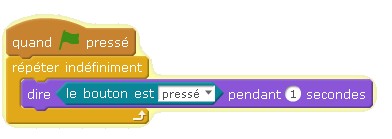
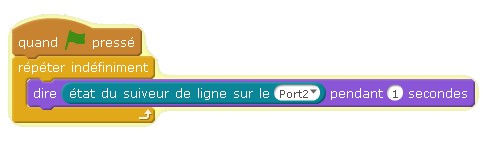
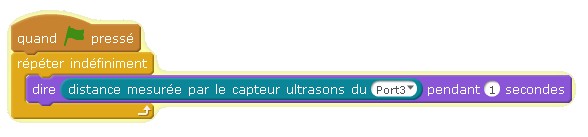
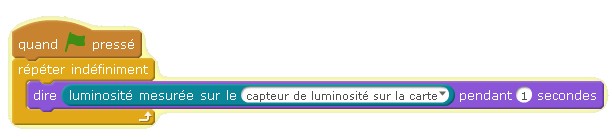
1- réaliser un programme pour comprendre le fonctionnement du capteur de ligne. 2- réaliser un programme permettant de tester le fonctionnement du capteur à ultrason (distance) 3- réaliser un programme pour le bouton poussoir et le capteur de luminosité.
Ce qu'il faut comprendre :
il vous est demandé d'expliquer comment fonctionnent les 4 capteurs de ce
système. Pour chacun d'eux, vous devez prendre des notes dans le cahier
pour pouvoir construire vos futurs programmes.
Partie 03 - Programmation des actionneurs du système.
Lors
de l'activité précédente, nous avons réalisé plusieurs programmes
permettant de comprendre le fonctionnement des capteurs du robot.
Le capteur ULTRASON renvoie au système une distance exprimée en centimètres.
Le capteur de suivi de ligne renvoie un code chiffré de 0 à 3.
Le capteur de luminosité renvoie une valeur changeant de 0 à 1024.
Le bouton poussoir renvoie une valeur de 0 ou 1.
Nous allons continuer la découverte de l'objet en réalisant plusieurs petits programmes pour piloter le robot.
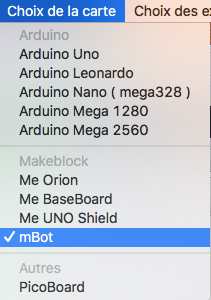
La
carte électronique recoie un programme, en fonction de l’état des
capteurs, le programme pourra ou non évoluer en activant des
actionneurs (moteurs, leds,son...) Dans un premier temps , nous allons piloter l’éclairage des lumières du robot ainsi que le son pouvant etre produit. Nous piloterons ensuite des déplacements.
MISSIONS
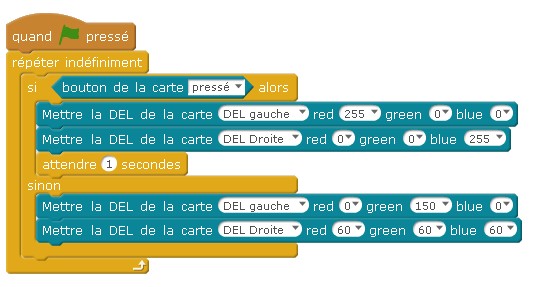
1- réaliser un programme pour le pilotage de Leds sur le robot.(modifier les couleurs
2
- ajouter ce bloc de code dans le programme pour que deux notes
différentes soient jouées lorsque l'on papui sur le bouton de la carte.
Notions d’algorithme et de programme. Notion de
variable informatique. Déclenchement d'une action par un événement, séquences
d'instructions, boucles, instructions conditionnelles. Systèmes embarqués.
Forme et transmission du signal. Capteur, actionneur, interface.