Après avoir visionné les vidéos ci dessous, quelles remarques peut-on formuler ?
Rechercher les avantages et inconvénients des différentes solutions présentées Quelles autres opérations peuvent réaliser des robots ?. De quoi a besoin un robot pour fonctionner ?
Bilan 01 : - expression du problème, - rôle et missions des robots de recherche, -contraintes auxquelles ils doivent résister.
Partie 2 - Comment sont programmés les objets ?
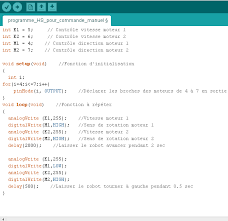
Il existe différents langages de programmation. Chaque langage vise à définir une série de comportements prédéfinis de l'objet.
Nous allons utiliser trois modes de représentation d'un programme. 1 - L’algorithme : c'est l'expression , à l’écrit, du comportement de
l'objet. On explique chacune des étapes du programme et on exprime les
différentes conditions qui permettent de le faire évoluer. (si...
alors...sinon, faire tant que...., répéter 10 fois)...
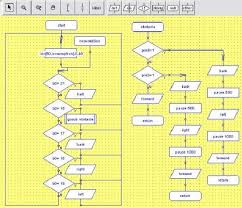
2 - L'algorigramme : c'est une représentation graphique du programme,
chaque test et chaque action est représenté par un schema et des liens
les connectent afin d'en comprendre le déroulement.
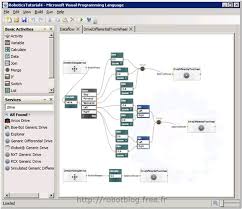
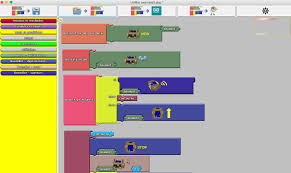
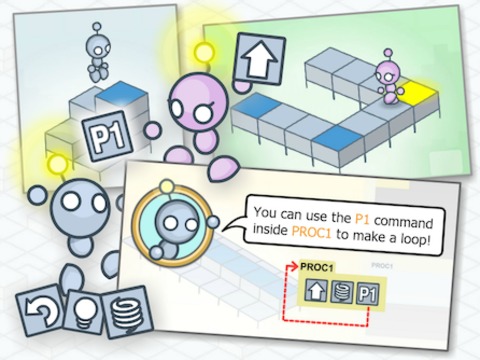
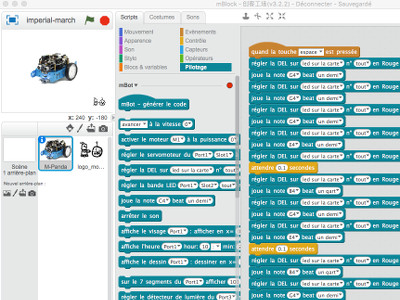
3 - Les programmes bloc : c'est le langage utilisé par les logiciel Scratch et Mblock. On imbrique des blocs les uns avec les autres afin de définir le programme. Ce langage peut paraitre aisé mais il devient assez complexe si le travail préparatoire n'est pas correctement réalisé. Cette programmation est facile à réaliser mais difficile à corriger si on manque de rigueur.
Activités
Relever deux séries de défis de programmation par bloc.
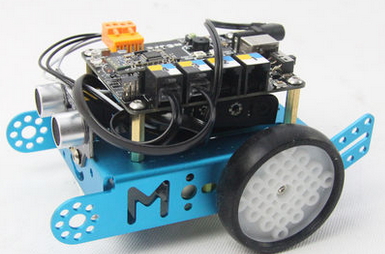
Le Robot présent en classe est système simple à
utiliser permettant des expériences pratiques avec son logiciel par
programmation graphique mBlock.
C'est un robot complet pouvant être employé dans diverses situations en fonctions des tâches qu'il aura à réaliser.
Le robot est conçu sur une base évolutive, ouvrant de nombreuses perceptives de modifications : ajouts de capteurs, d'actionneurs comme
des servomoteurs...
Robot Mbot (sans carrosserie)
Assemblage et montage du robot
Programmation avec le logiciel MBlock
Nous allons observer le fonctionnement des deux programmes que le professeur a préchargé dans le robot.
Quels comportements le système adopte t il?
Rédiger l’algorithme simple de ces deux modes de fonctionnement.
Bilan 02 : - système programmable, -capteurs, actionneurs, partie système -énergie -algorithme.
Notions d’algorithme et de programme. Notion de
variable informatique. Déclenchement d'une action par un événement, séquences
d'instructions, boucles, instructions conditionnelles. Systèmes embarqués.
Forme et transmission du signal. Capteur, actionneur, interface.